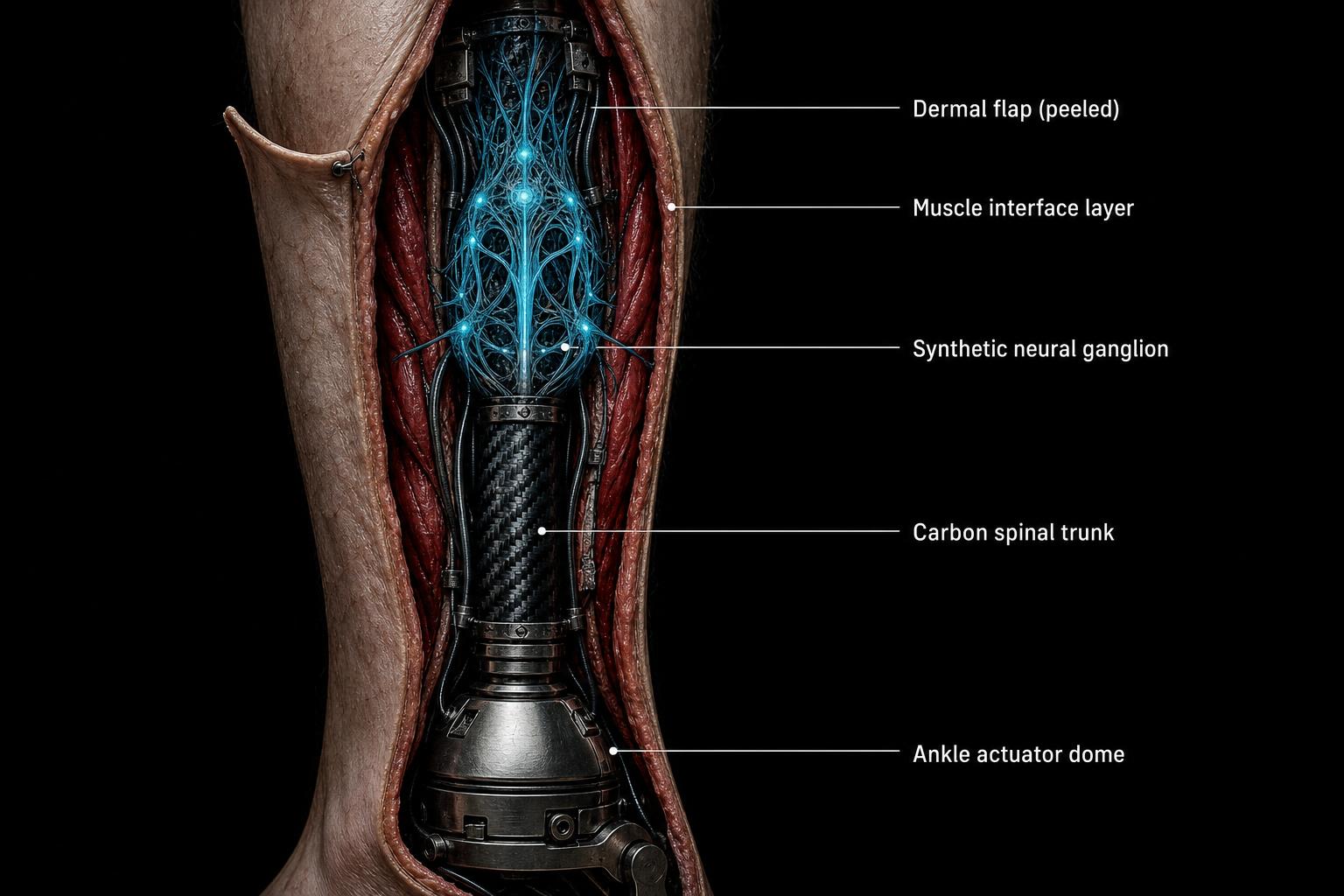
03 · SUBSECTIONHind-Limb Drive System
Reflex loop
Sub-12 ms balance loop closed on a dedicated real-time co-processor.
A dedicated real-time co-processor closes the balance loop in under 12 ms. On a stumble, the limb deploys a hip-strategy recovery before higher-level cognition is even involved — the companion catches itself, then continues whatever it was doing.
SPSpecifications