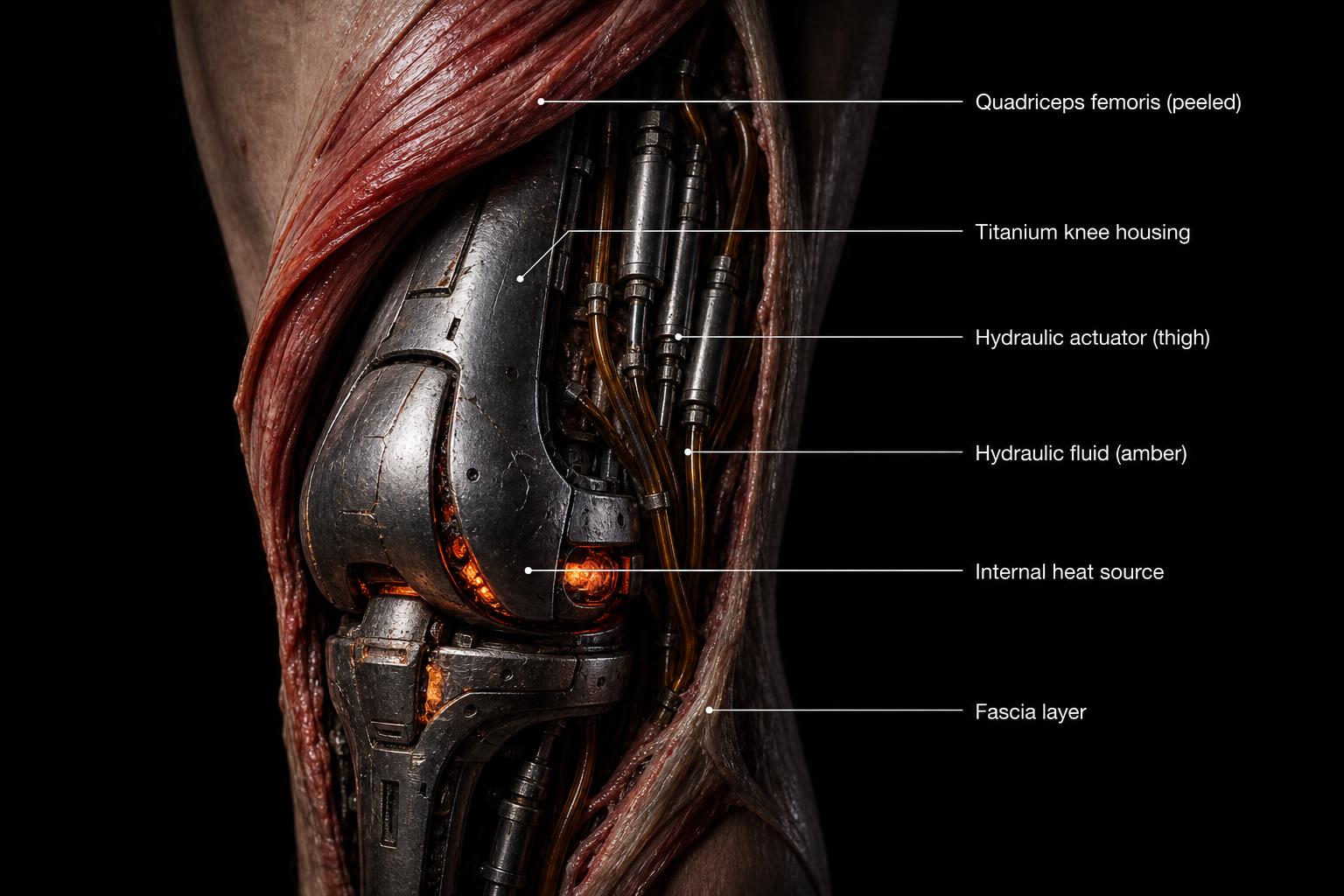
01Hind-Limb Drive System
Skeletal architecture
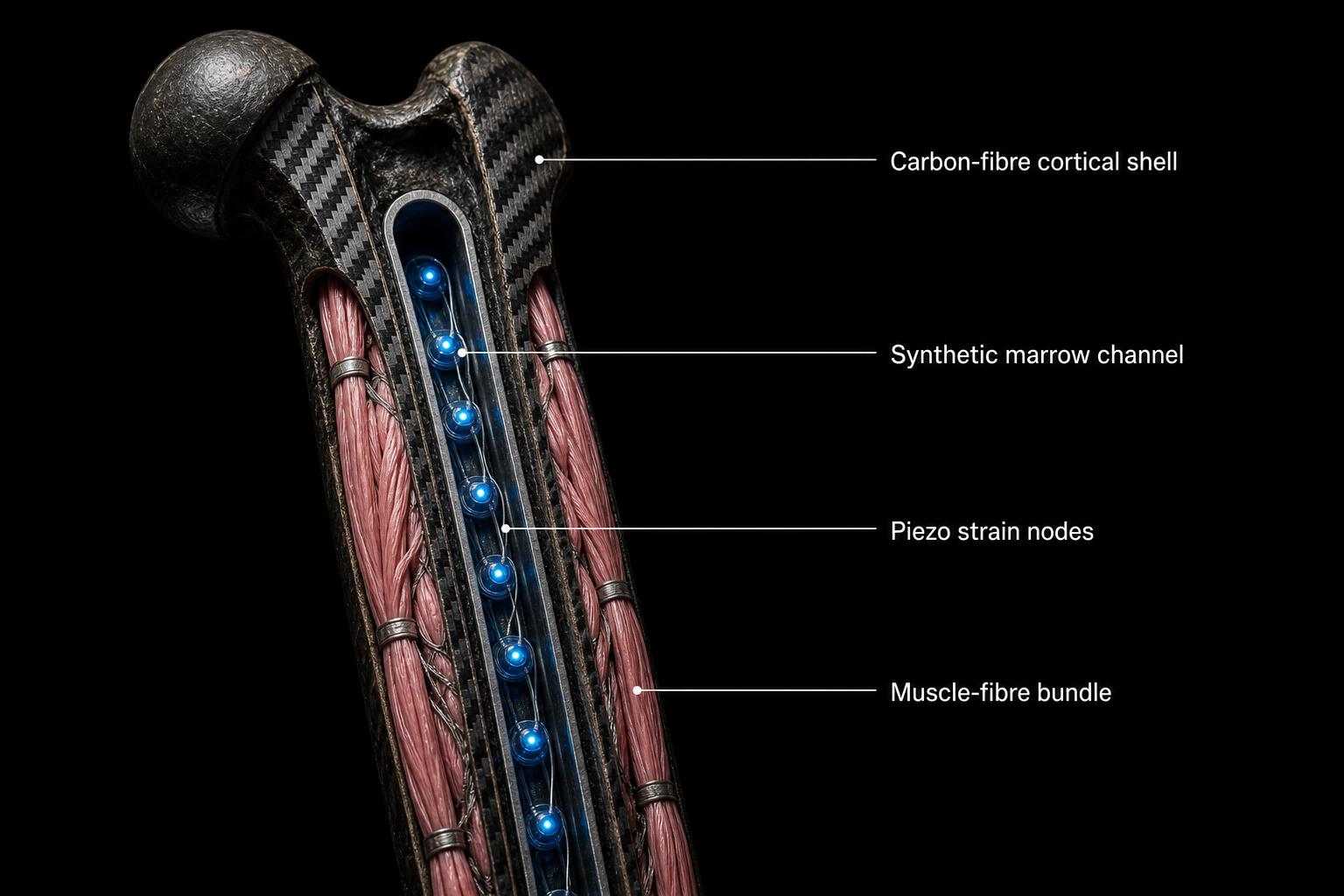
Pultruded carbon-fibre femur and tibia, hollow-core for stiffness-to-weight, terminated in forged titanium knee and ankle blocks. Bone geometry mirrors the chimpanzee — shorter femur, robust patella, broad calcaneus — for a low centre of mass and a stable knuckle-or-bipedal stance.