01Prehensile Hand System
Anatomy
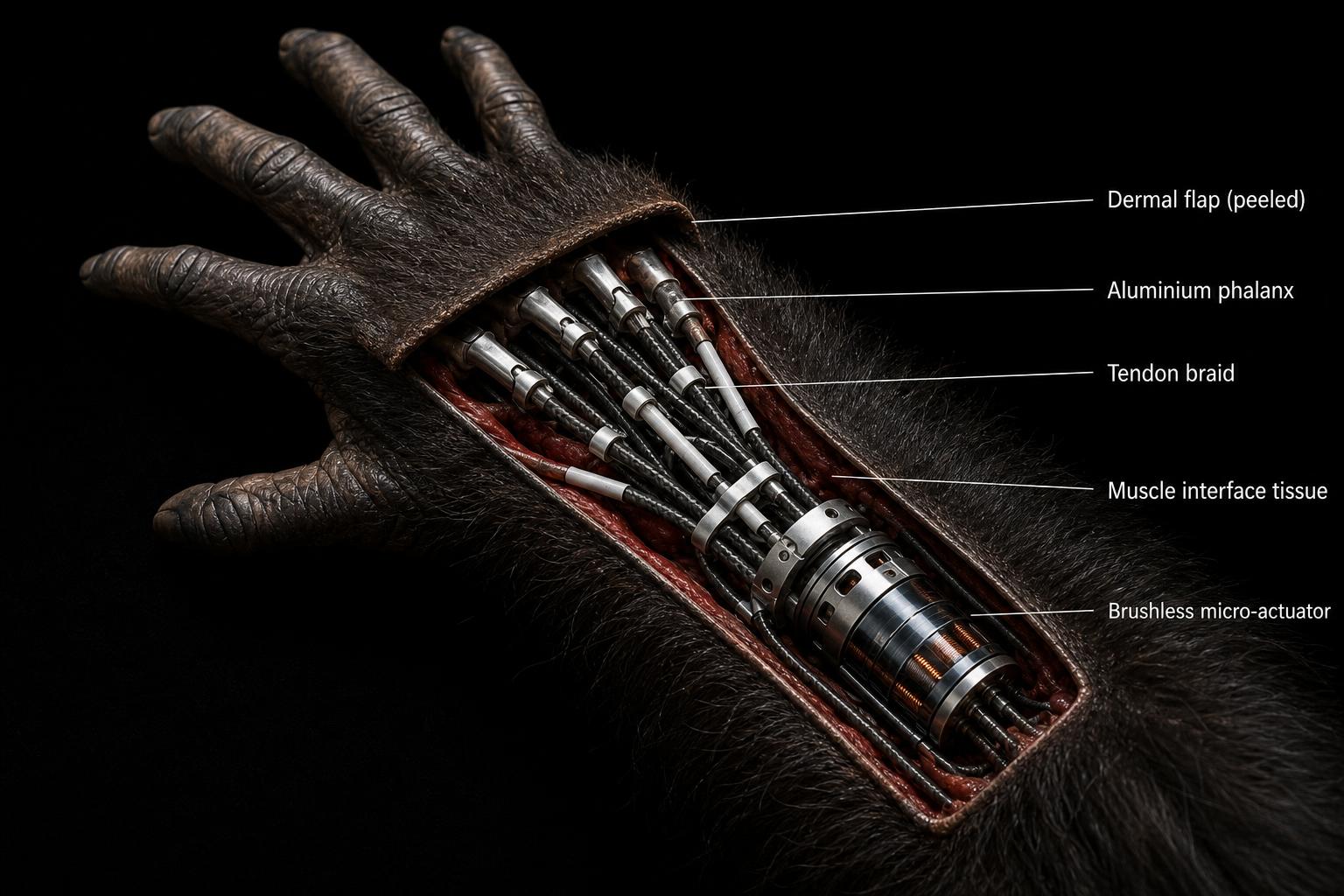
Four long fingers and a shorter opposable thumb — the chimpanzee precision-grip pattern. Phalanges are machined aluminium with carbon-fibre tendons routed through PTFE sheaths to the forearm, where 22 brushless micro-actuators sit out of the way of the impact envelope.